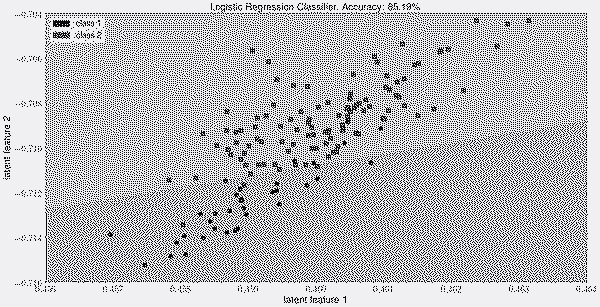
I led the research and implementation of a neural network based ML model that is able to detect who is driving a car based on its CAN bus sensor signals. I came up with a novel network architecture that leverages the sequential nature of vehicle sensor data and models the problem as a sequence classification problem. I leveraged Schmidhuber’s LSTM architecture combined with an autoencoder loss function to learn a high-dimensional latent-space representation of a driver’s behavior. This could then be used to run traditional ML methods like clustering and classification to detect patterns and match them to real drivers.
The envisioned real-world applications for this solution were personalized in-car customization, dynamic pricing and logbooks for insurances or commercial vehicle fleets.